

{kind=link}
[ad_1]
Hyper-realistic digital worlds have been heralded as the very best driving colleges for autonomous automobiles (AVs), since they’ve confirmed fruitful check beds for safely making an attempt out harmful driving situations. Tesla, Waymo, and different self-driving firms all rely closely on information to allow costly and proprietary photorealistic simulators, since testing and gathering nuanced I-almost-crashed information normally isn’t probably the most simple or fascinating to recreate.
To that finish, scientists from MIT’s Laptop Science and Synthetic Intelligence Laboratory (CSAIL) created “VISTA 2.0,” a data-driven simulation engine the place automobiles can be taught to drive in the actual world and get better from near-crash situations. What’s extra, all the code is being open-sourced to the general public.
“At the moment, solely firms have software program like the kind of simulation environments and capabilities of VISTA 2.0, and this software program is proprietary. With this launch, the analysis group may have entry to a strong new software for accelerating the analysis and improvement of adaptive sturdy management for autonomous driving,” says MIT Professor and CSAIL Director Daniela Rus, senior writer on a paper concerning the analysis.
VISTA 2.0 builds off of the group’s earlier mannequin, VISTA, and it’s essentially completely different from present AV simulators because it’s data-driven — which means it was constructed and photorealistically rendered from real-world information — thereby enabling direct switch to actuality. Whereas the preliminary iteration supported solely single automotive lane-following with one digital camera sensor, reaching high-fidelity data-driven simulation required rethinking the foundations of how completely different sensors and behavioral interactions might be synthesized.
Enter VISTA 2.0: a data-driven system that may simulate advanced sensor sorts and massively interactive situations and intersections at scale. With a lot much less information than earlier fashions, the group was capable of prepare autonomous automobiles that could possibly be considerably extra sturdy than these skilled on giant quantities of real-world information.
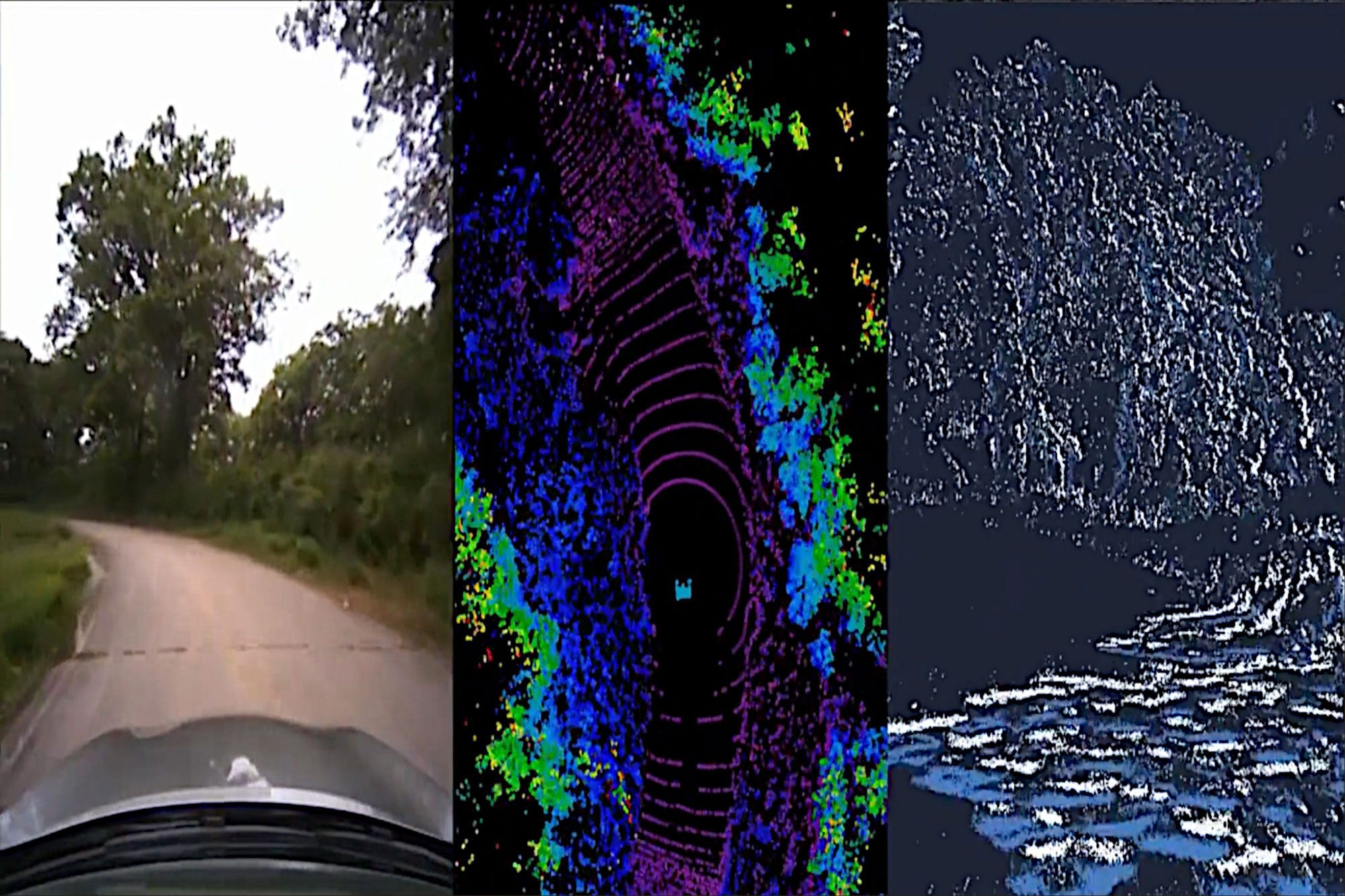
“It is a large soar in capabilities of data-driven simulation for autonomous automobiles, in addition to the rise of scale and talent to deal with better driving complexity,” says Alexander Amini, CSAIL PhD pupil and co-lead writer on two new papers, along with fellow PhD pupil Tsun-Hsuan Wang. “VISTA 2.0 demonstrates the flexibility to simulate sensor information far past 2D RGB cameras, but additionally extraordinarily excessive dimensional 3D lidars with thousands and thousands of factors, irregularly timed event-based cameras, and even interactive and dynamic situations with different automobiles as properly.”
The group was capable of scale the complexity of the interactive driving duties for issues like overtaking, following, and negotiating, together with multiagent situations in extremely photorealistic environments.
Coaching AI fashions for autonomous automobiles includes hard-to-secure fodder of various types of edge circumstances and unusual, harmful situations, as a result of most of our information (fortunately) is simply run-of-the-mill, day-to-day driving. Logically, we will’t simply crash into different automobiles simply to show a neural community how one can not crash into different automobiles.
Not too long ago, there’s been a shift away from extra basic, human-designed simulation environments to these constructed up from real-world information. The latter have immense photorealism, however the former can simply mannequin digital cameras and lidars. With this paradigm shift, a key query has emerged: Can the richness and complexity of all the sensors that autonomous automobiles want, equivalent to lidar and event-based cameras which might be extra sparse, precisely be synthesized?
Lidar sensor information is way more durable to interpret in a data-driven world — you’re successfully making an attempt to generate brand-new 3D level clouds with thousands and thousands of factors, solely from sparse views of the world. To synthesize 3D lidar level clouds, the group used the info that the automotive collected, projected it right into a 3D area coming from the lidar information, after which let a brand new digital automobile drive round domestically from the place that unique automobile was. Lastly, they projected all of that sensory info again into the body of view of this new digital automobile, with the assistance of neural networks.
Along with the simulation of event-based cameras, which function at speeds better than 1000’s of occasions per second, the simulator was able to not solely simulating this multimodal info, but additionally doing so all in actual time — making it doable to coach neural nets offline, but additionally check on-line on the automotive in augmented actuality setups for secure evaluations. “The query of if multisensor simulation at this scale of complexity and photorealism was doable within the realm of data-driven simulation was very a lot an open query,” says Amini.
With that, the driving faculty turns into a celebration. Within the simulation, you’ll be able to transfer round, have several types of controllers, simulate several types of occasions, create interactive situations, and simply drop in model new automobiles that weren’t even within the unique information. They examined for lane following, lane turning, automotive following, and extra dicey situations like static and dynamic overtaking (seeing obstacles and transferring round so that you don’t collide). With the multi-agency, each actual and simulated brokers work together, and new brokers might be dropped into the scene and managed any which means.
Taking their full-scale automotive out into the “wild” — a.ok.a. Devens, Massachusetts — the group noticed rapid transferability of outcomes, with each failures and successes. They had been additionally capable of display the bodacious, magic phrase of self-driving automotive fashions: “sturdy.” They confirmed that AVs, skilled fully in VISTA 2.0, had been so sturdy in the actual world that they might deal with that elusive tail of difficult failures.
Now, one guardrail people depend on that may’t but be simulated is human emotion. It’s the pleasant wave, nod, or blinker change of acknowledgement, that are the kind of nuances the group needs to implement in future work.
“The central algorithm of this analysis is how we will take a dataset and construct a very artificial world for studying and autonomy,” says Amini. “It’s a platform that I imagine at some point might lengthen in many alternative axes throughout robotics. Not simply autonomous driving, however many areas that depend on imaginative and prescient and complicated behaviors. We’re excited to launch VISTA 2.0 to assist allow the group to gather their very own datasets and convert them into digital worlds the place they will straight simulate their very own digital autonomous automobiles, drive round these digital terrains, prepare autonomous automobiles in these worlds, after which can straight switch them to full-sized, actual self-driving automobiles.”
Amini and Wang wrote the paper alongside Zhijian Liu, MIT CSAIL PhD pupil; Igor Gilitschenski, assistant professor in laptop science on the College of Toronto; Wilko Schwarting, AI analysis scientist and MIT CSAIL PhD ’20; Track Han, affiliate professor at MIT’s Division of Electrical Engineering and Laptop Science; Sertac Karaman, affiliate professor of aeronautics and astronautics at MIT; and Daniela Rus, MIT professor and CSAIL director. The researchers introduced the work on the IEEE Worldwide Convention on Robotics and Automation (ICRA) in Philadelphia.
This work was supported by the Nationwide Science Basis and Toyota Analysis Institute. The group acknowledges the help of NVIDIA with the donation of the Drive AGX Pegasus.
[ad_2]