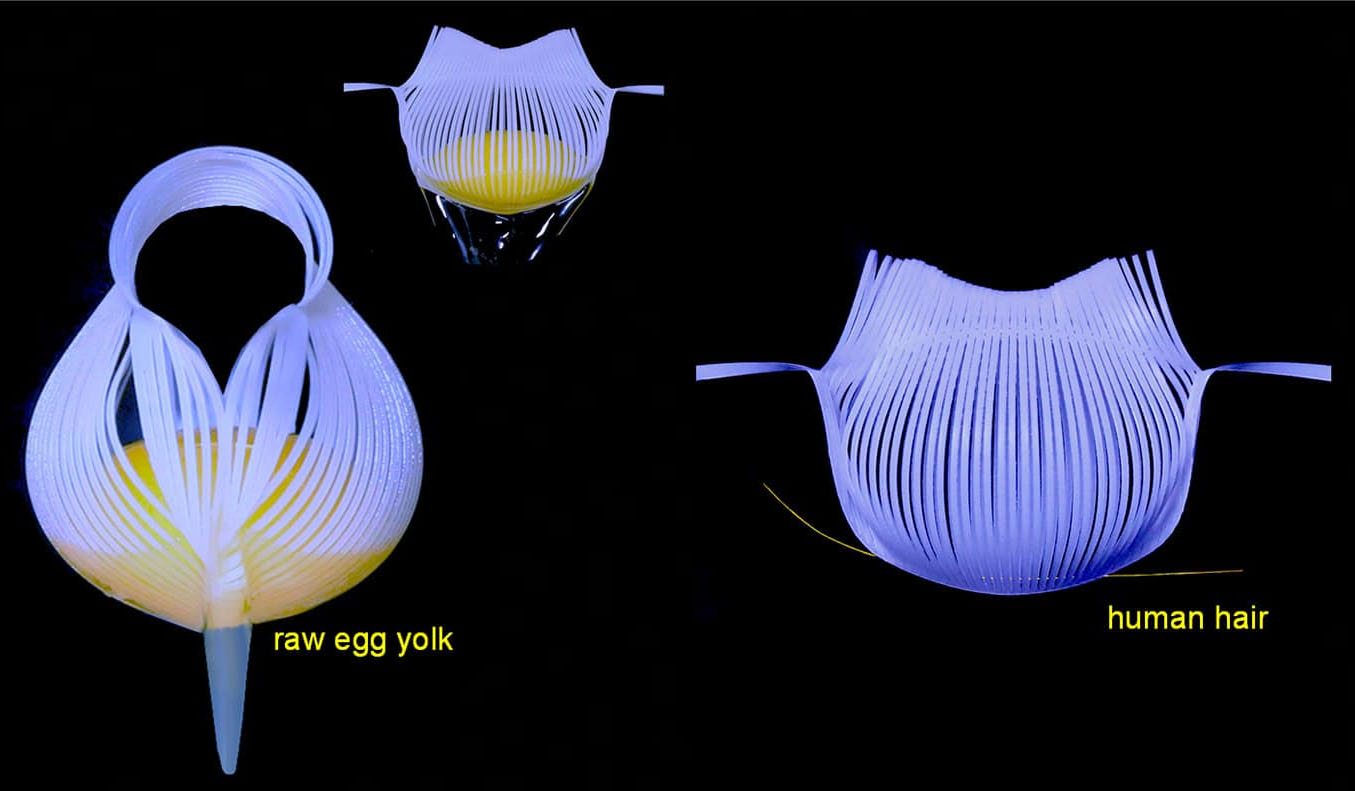
(Nanowerk Information) Engineering researchers from North Carolina State College have demonstrated a brand new sort of versatile, robotic grippers which might be capable of carry delicate egg yolks with out breaking them, and which might be exact sufficient to carry a human hair. The work has functions for each tender robotics and biomedical applied sciences.
The work attracts on the artwork of kirigami, which entails each reducing and folding two-dimensional (2D) sheets of fabric to type three-dimensional (3D) shapes. Particularly, the researchers have developed a brand new approach that entails utilizing kirigami to transform 2D sheets into curved 3D constructions by reducing parallel slits throughout a lot of the fabric. The ultimate form of the 3D construction is decided largely by the outer boundary of the fabric. For instance, a 2D materials that has a round boundary would type a spherical 3D form.
“We’ve outlined and demonstrated a mannequin that permits customers to work backwards,” says Yaoye Hong, first creator of a paper on the work (Nature Communications, “Boundary curvature guided programmable shape-morphing kirigami sheets”) and a Ph.D. pupil at NC State. “If customers know what kind of curved, 3D construction they want, they’ll use our method to find out the boundary form and sample of slits they should use within the 2D materials. And extra management of the ultimate construction is made potential by controlling the course through which the fabric is pushed or pulled.”
“Our approach is kind of a bit easier than earlier strategies for changing 2D supplies into curved 3D constructions, and it permits designers to create all kinds of custom-made constructions from 2D supplies,” says Jie Yin, corresponding creator of the paper and an affiliate professor of mechanical and aerospace engineering at NC State.
The researchers demonstrated the utility of their approach by creating grippers able to grabbing and lifting objects starting from egg yolks to a human hair.
“We’ve proven that our approach can be utilized to create instruments able to greedy and transferring even extraordinarily fragile objects,” Yin says.
“Standard grippers grasp an object firmly – they seize issues by placing stress on them,” Yin says. “That may pose issues when trying to grip fragile objects, equivalent to egg yolks. However our grippers basically encompass an object after which carry it – much like the way in which we cup our palms round an object. This permits us to ‘grip’ and transfer even delicate objects, with out sacrificing precision.”
Nevertheless, the researchers word that there are a number of different potential functions, equivalent to utilizing the approach to design biomedical applied sciences that conform to the form of a joint – just like the human knee.
“Consider good bandages or monitoring gadgets able to bending and transferring along with your knee or elbow,” Yin says.
“That is proof-of-concept work that reveals our approach works,” Yin says. “We’re now within the means of integrating this method into tender robotics applied sciences to deal with industrial challenges. We’re additionally exploring how this method might be used to create gadgets that might be used to use heat to the human knee, which might have therapeutic functions.
“We’re open to working with trade companions to discover further functions and to search out methods to maneuver this method from the lab into sensible use.”
{kind=link}

")