

{kind=link}
[ad_1]
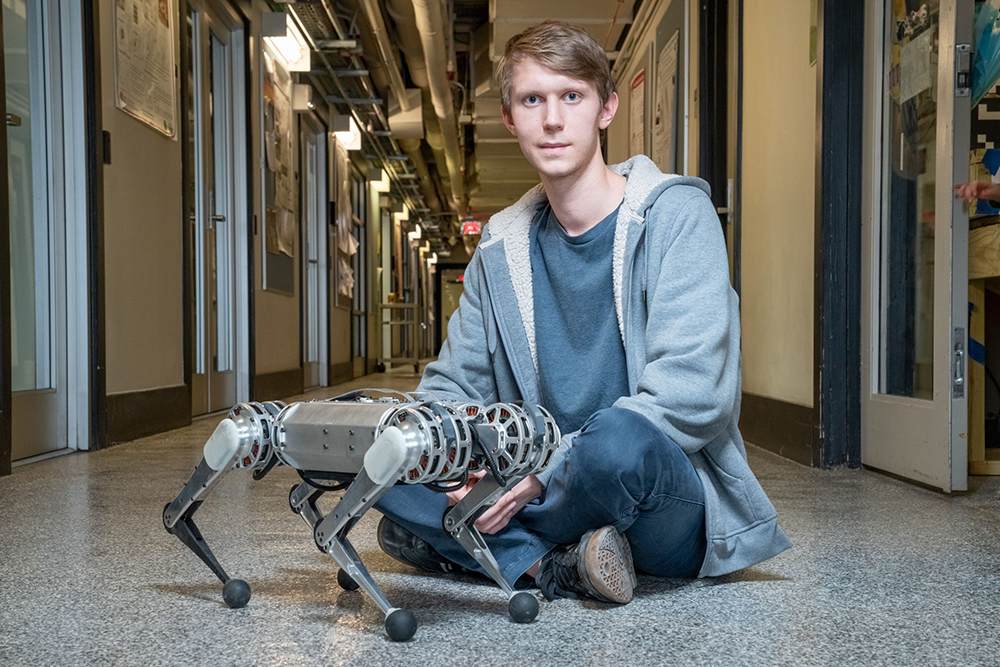
In November 2018, MIT Professor Sangbae Kim introduced his mini cheetah robotic onto “The Tonight Present’s” Tonight Present-botics section. A lot to the delight of host Jimmy Fallon, the mini cheetah did some yoga, obtained again up after falling, and executed an ideal backflip. Behind the stage, Benjamin Katz ’16, SM ’18 was remotely controlling the cheetah’s nimble maneuvers.
For Katz, ready within the wings because the robotic carried out in entrance of a nationwide viewers was the fruits of practically 5 years of labor.
As an undergraduate at MIT, Katz studied mechanical engineering, choosing the versatile Course 2A diploma program with a focus in controls, instrumentation, and robotics. Towards the top of his first 12 months, he emailed Kim to see if there have been any job alternatives in Kim’s Biomimetic Robotics Lab. He then spent the summer time in Kim’s lab as a part of the MIT Undergraduate Analysis Alternatives Program (UROP). For his UROP analysis and undergraduate thesis, he started to have a look at the right way to make the most of items constructed for the electronics interest market in robotics. “Yow will discover actually high-performance motors constructed for issues like distant management airplanes and drones. I principally thought you would additionally use these elements for robots, which is one thing nobody was doing,” recollects Katz.
Kim was instantly impressed by Katz’s skills an engineer and designer.
“Ben is an especially versatile engineer who can cowl construction and mechanism design, electrical motor dynamics, energy electronics, and classical management, a variety of experience often requiring four-to-five engineers to cowl,” says Kim.
After deciding to pursue a grasp’s diploma in mechanical engineering at MIT, Katz continued working in Kim’s lab and developed options for actuators in robotics. Whereas engaged on the third iteration of Kim’s robotic, generally known as Cheetah 3, Katz and his labmates shifted their focus to creating a smaller model of the robotic.
“There are a variety of good issues about having a smaller robotic: If one thing breaks you may simply repair it, it’s cheaper, and it’s secure sufficient for one particular person to wrangle alone,” says Katz. “Regardless that a small robotic might not all the time be essentially the most sensible for real-world purposes, its controllers, software program, and analysis could be trivially ported to an enormous robotic that may carry bigger payloads.”
Drawing upon his undergraduate analysis, Katz and the analysis workforce used 12 motors initially designed for drones to construct actuators in every joint of the small quadruped robotic that might be dubbed the “mini cheetah.”
Armed with this smaller robotic, Katz got down to make the mini cheetah extra agile and resilient. Alongside then-EECS pupil Jared Di Carlo ’19, Mng ’20, Katz centered on controls associated to locomotion within the mini cheetah. At school 6.832 (Underactuated Robotics), taught by Professor Russ Tedrake, the pair labored on a challenge that might enable the mini cheetah safely backflip from a crouched place.
“It was principally an enormous offline optimization downside to get the mini cheetah to backflip,” says Katz.
Utilizing offline nonlinear optimization to generate the backflip trajectory, he and Di Carlo had been in a position to program the mini cheetah to crouch and rotate 360 levels round an axis.
Whereas engaged on the cheetah, Katz was continually pursuing different engineering tasks as a interest. This included a really completely different rotating robotic as a pet challenge. Alongside Di Carlo, Katz utilized the MIT group makerspace generally known as MITERS to develop a robotic that might clear up a Rubik’s Dice in a record-breaking 0.38 seconds.
“That challenge was purely for enjoyable throughout MIT’s Impartial Actions Interval,” recollects Katz. “We used custom-built actuators on every of the Rubik’s Dice’s faces alongside webcams to establish the colours and transfer the blocks accordingly.”
He chronicled his different pet tasks on his “build-its” weblog, which developed a robust following. Tasks included planar magnetic headphones, a desktop Furuta pendulum, and an electrical journey ukulele.
“Ben was continually constructing and analyzing one thing together with our lab and sophistication tasks throughout his whole time at MIT,” says Kim. “His incessant need to study, construct, and analyze is kind of outstanding.”
After graduating together with his grasp’s diploma in 2018, Katz labored as a technical affiliate in Kim’s lab earlier than accepting a place at Boston Dynamics in 2019.
As a designer at Boston Dynamics, Katz has transitioned from cheetah robots to humanoid robots on ATLAS, a analysis platform billed because the “world’s most dynamic humanoid robotic.” Very similar to the mini cheetah, ATLAS can execute extremely dynamic maneuvers, together with backflips and even parkour.
Whereas the mini cheetah holding yoga poses and ATLAS doing parkour looks like leisure befitting “The Tonight Present,” Katz is fast to remind others that these robots are fulfilling a real-world want. The robots may sometime maneuver in areas which might be too harmful for people — together with buildings which might be on fireplace and catastrophe areas. They may open new prospects for lifesaving catastrophe aid and first-responders in emergencies.
“What we did in Sangbae’s lab goes to assist make these machines ubiquitous and really helpful in the actual world as viable merchandise,” provides Katz.
[ad_2]