
{kind=link}
[ad_1]
|
Hearken to this text  |

Within the automation world, there could be a high-quality line between what is taken into account a movement controller and what represents a fundamental servo drive. It’s vital to grasp the performance and intelligence of every system since, in lots of purposes, each a movement controller and a servo drive are required to finish the system.
The servo system
A servo motor is powered by a servo drive that provides voltage and present to the motor coils after which displays suggestions to shut the servo loop. Usually, the servo drive consists of three embedded servo loops – the present (or torque) loop, velocity loop, and place loop – that work together with one another to create precision movement. The anticipated motor operation will decide which loops are required.
- In a torque management software, which requires a selected torque, solely a present loop is required. Since torque is straight proportional to present, torque is regulated by a sensor that gives present suggestions to the servo drive.
- With velocity management purposes, it’s common to seek out each present and velocity loops. The speed loop displays a sensor that gives velocity info to the servo drive after which makes use of this knowledge to regulate the present loop to extend or lower torque.
- Lastly, a place loop software employs a suggestions sensor coupled to the motor that sends place info to the servo drive or movement controller, which in flip alerts the rate loop to extend or lower velocity, which then relays the data to the present loop to manage torque.
Defining the drive and controller roles
In a torque management software of a brushless dc servo motor, a “system” provides present and voltage to a motor based mostly on a commanded enter measured in opposition to the present suggestions. The equipment that gives the ability to the motor known as, in correct phrases, a servo amplifier or servo drive. A present or torque drive is ineffective until it receives a selected command to inform it what torque to supply. The command can come from a wide range of sources that basically act because the “controller”. The command could also be so simple as an individual, functioning as a controller, manually adjusting a potentiometer to use a +/- 10 Vdc sign to the drive based mostly on the specified output torque.
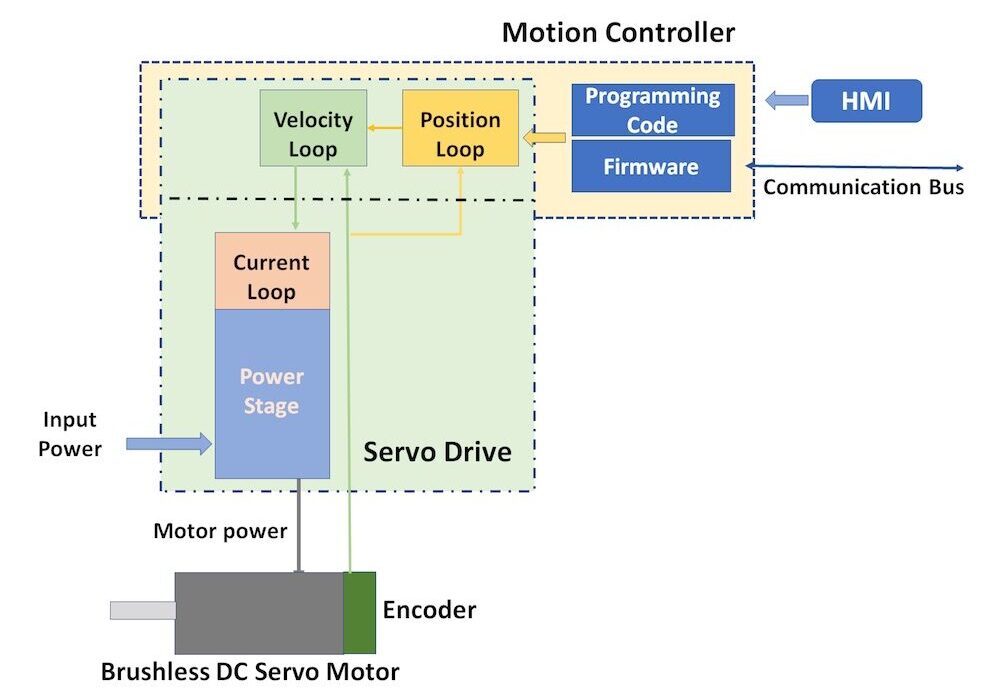 In a typical brushless dc servo system, three embedded loops with numerous compensation and filtering components are current. The inside loop (the present loop) is managed by the rate loop, which in flip is managed by the place loop. The present loop at all times resides within the drive, whereas the rate and place loops reside in both the drive or controller. The present loop makes use of a motor present sensor to measure present within the motor windings, whereas the rate loop makes use of a velocity sensor (sometimes an encoder) to measure motor velocity, which additionally offers place info to shut the place loop.
In a typical brushless dc servo system, three embedded loops with numerous compensation and filtering components are current. The inside loop (the present loop) is managed by the rate loop, which in flip is managed by the place loop. The present loop at all times resides within the drive, whereas the rate and place loops reside in both the drive or controller. The present loop makes use of a motor present sensor to measure present within the motor windings, whereas the rate loop makes use of a velocity sensor (sometimes an encoder) to measure motor velocity, which additionally offers place info to shut the place loop.
Movement controllers are microprocessor-based gadgets with advanced algorithms that generate Pulse Width Modulated (PWM) waveforms. Energy transistors inside the servo drive switch the present and voltage waveforms to energise the motor. The movement controller sometimes processes the suggestions info from the assorted servo loops. Controllers use suggestions info to commutate the motor to behave exactly as commanded by the microprocessor. In essence, the intelligence offered by the microprocessor acts because the controller, whereas the electronics related to the ability gadgets acts because the drive. Principally, a controller is the component that applies a selected command to a place, velocity, or present loop, whereas a drive offers the voltage and present to the motors as demanded by the controller.
The controller is usually a programmable system that shops and runs code offered by the programmer. Programming is developed in a wide range of languages, comparable to BASIC, C+/C++, VB, and languages laid out in IEC 61131-3 requirements. Controllers have quite a few security components to stop overloads or cease movement within the occasion of part failures. Drives, alternatively, are inclined to deal with receiving the enter instructions of the controller and switching the ability transistors on and off. This creates the present and voltage required to satisfy the commanded torque and velocity.
With advances in microprocessors and new switching gadgets, controllers and drives have gotten increasingly intertwined – principally in centralized methods the place all electronics are co-located in a single management cupboard. In decentralized options, the movement controller resides within the cupboard whereas the drives are collocated close to the motors and talk with the centralized movement controller by means of a movement area bus.
Editor’s Notice: This text was written by a workforce of movement and automation consultants at Kollmorgen, together with engineers, customer support and design consultants.
[ad_2]