

{kind=link}
[ad_1]
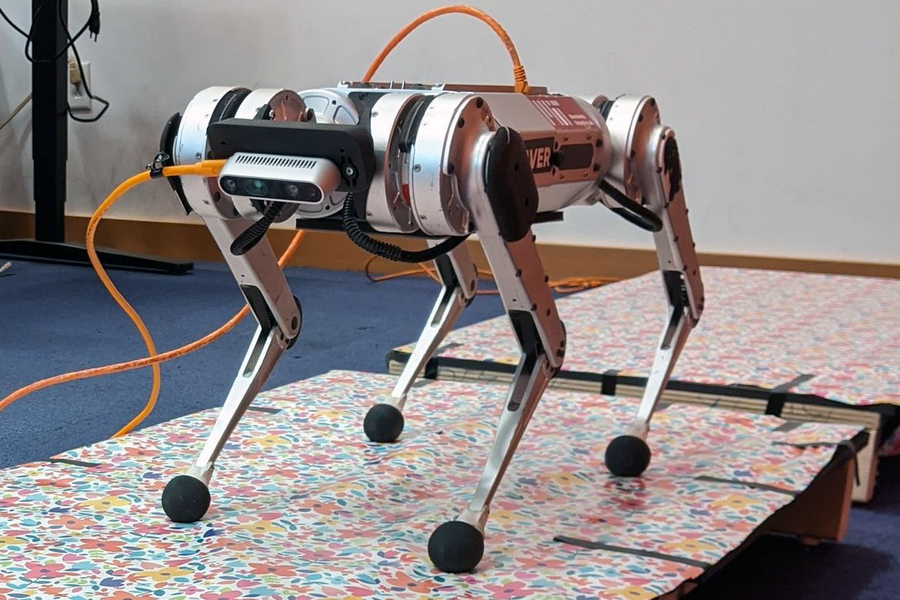
MIT researchers have developed a system that improves the pace and agility of legged robots as they soar throughout gaps within the terrain. Credit: Photograph courtesy of the researchers
By Adam Zewe | MIT Information Workplace
A loping cheetah dashes throughout a rolling subject, bounding over sudden gaps within the rugged terrain. The motion could look easy, however getting a robotic to maneuver this fashion is an altogether completely different prospect.
In recent times, four-legged robots impressed by the motion of cheetahs and different animals have made nice leaps ahead, but they nonetheless lag behind their mammalian counterparts in terms of touring throughout a panorama with fast elevation adjustments.
“In these settings, it’s essential use imaginative and prescient in an effort to keep away from failure. For instance, stepping in a niche is troublesome to keep away from in case you can’t see it. Though there are some present strategies for incorporating imaginative and prescient into legged locomotion, most of them aren’t actually appropriate to be used with rising agile robotic methods,” says Gabriel Margolis, a PhD scholar within the lab of Pulkit Agrawal, professor within the Pc Science and Synthetic Intelligence Laboratory (CSAIL) at MIT.
Now, Margolis and his collaborators have developed a system that improves the pace and agility of legged robots as they soar throughout gaps within the terrain. The novel management system is break up into two elements — one which processes real-time enter from a video digital camera mounted on the entrance of the robotic and one other that interprets that data into directions for a way the robotic ought to transfer its physique. The researchers examined their system on the MIT mini cheetah, a robust, agile robotic constructed within the lab of Sangbae Kim, professor of mechanical engineering.
In contrast to different strategies for controlling a four-legged robotic, this two-part system doesn’t require the terrain to be mapped prematurely, so the robotic can go anyplace. Sooner or later, this might allow robots to cost off into the woods on an emergency response mission or climb a flight of stairs to ship medicine to an aged shut-in.
Margolis wrote the paper with senior creator Pulkit Agrawal, who heads the Unbelievable AI lab at MIT and is the Steven G. and Renee Finn Profession Growth Assistant Professor within the Division of Electrical Engineering and Pc Science; Professor Sangbae Kim within the Division of Mechanical Engineering at MIT; and fellow graduate college students Tao Chen and Xiang Fu at MIT. Different co-authors embrace Kartik Paigwar, a graduate scholar at Arizona State College; and Donghyun Kim, an assistant professor on the College of Massachusetts at Amherst. The work will likely be introduced subsequent month on the Convention on Robotic Studying.
It’s all beneath management
Using two separate controllers working collectively makes this method particularly progressive.
A controller is an algorithm that may convert the robotic’s state right into a set of actions for it to observe. Many blind controllers — these that don’t incorporate imaginative and prescient — are strong and efficient however solely allow robots to stroll over steady terrain.
Imaginative and prescient is such a fancy sensory enter to course of that these algorithms are unable to deal with it effectively. Programs that do incorporate imaginative and prescient normally depend on a “heightmap” of the terrain, which should be both preconstructed or generated on the fly, a course of that’s usually sluggish and liable to failure if the heightmap is inaccurate.
To develop their system, the researchers took the most effective parts from these strong, blind controllers and mixed them with a separate module that handles imaginative and prescient in real-time.
The robotic’s digital camera captures depth photographs of the upcoming terrain, that are fed to a high-level controller together with details about the state of the robotic’s physique (joint angles, physique orientation, and so forth.). The high-level controller is a neural community that “learns” from expertise.
That neural community outputs a goal trajectory, which the second controller makes use of to give you torques for every of the robotic’s 12 joints. This low-level controller just isn’t a neural community and as an alternative depends on a set of concise, bodily equations that describe the robotic’s movement.
“The hierarchy, together with using this low-level controller, permits us to constrain the robotic’s habits so it’s extra well-behaved. With this low-level controller, we’re utilizing well-specified fashions that we are able to impose constraints on, which isn’t normally potential in a learning-based community,” Margolis says.
Instructing the community
The researchers used the trial-and-error methodology often called reinforcement studying to coach the high-level controller. They carried out simulations of the robotic working throughout tons of of various discontinuous terrains and rewarded it for profitable crossings.
Over time, the algorithm discovered which actions maximized the reward.
Then they constructed a bodily, gapped terrain with a set of wood planks and put their management scheme to the take a look at utilizing the mini cheetah.
“It was undoubtedly enjoyable to work with a robotic that was designed in-house at MIT by a few of our collaborators. The mini cheetah is a superb platform as a result of it’s modular and made largely from elements that you could order on-line, so if we needed a brand new battery or digital camera, it was only a easy matter of ordering it from an everyday provider and, with just a little little bit of assist from Sangbae’s lab, putting in it,” Margolis says.
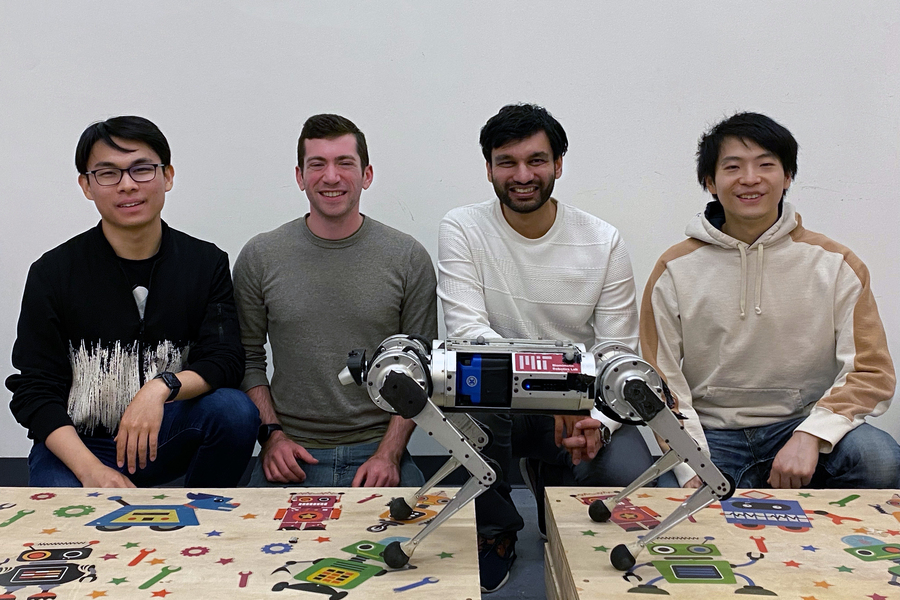
From left to proper: PhD college students Tao Chen and Gabriel Margolis; Pulkit Agrawal, the Steven G. and Renee Finn Profession Growth Assistant Professor within the Division of Electrical Engineering and Pc Science; and PhD scholar Xiang Fu. Credit: Photograph courtesy of the researchers
Estimating the robotic’s state proved to be a problem in some instances. In contrast to in simulation, real-world sensors encounter noise that may accumulate and have an effect on the end result. So, for some experiments that concerned high-precision foot placement, the researchers used a movement seize system to measure the robotic’s true place.
Their system outperformed others that solely use one controller, and the mini cheetah efficiently crossed 90 % of the terrains.
“One novelty of our system is that it does modify the robotic’s gait. If a human have been attempting to leap throughout a very huge hole, they could begin by working actually quick to construct up pace after which they could put each ft collectively to have a very highly effective leap throughout the hole. In the identical approach, our robotic can modify the timings and length of its foot contacts to higher traverse the terrain,” Margolis says.
Leaping out of the lab
Whereas the researchers have been capable of show that their management scheme works in a laboratory, they nonetheless have a protracted method to go earlier than they will deploy the system in the actual world, Margolis says.
Sooner or later, they hope to mount a extra highly effective laptop to the robotic so it will probably do all its computation on board. In addition they wish to enhance the robotic’s state estimator to eradicate the necessity for the movement seize system. As well as, they’d like to enhance the low-level controller so it will probably exploit the robotic’s full vary of movement, and improve the high-level controller so it really works effectively in numerous lighting situations.
“It’s exceptional to witness the flexibleness of machine studying strategies able to bypassing rigorously designed intermediate processes (e.g. state estimation and trajectory planning) that centuries-old model-based strategies have relied on,” Kim says. “I’m enthusiastic about the way forward for cellular robots with extra strong imaginative and prescient processing educated particularly for locomotion.”
The analysis is supported, partially, by the MIT’s Unbelievable AI Lab, Biomimetic Robotics Laboratory, NAVER LABS, and the DARPA Machine Frequent Sense Program.
tags: bio-inspired, c-Analysis-Innovation

MIT Information
[ad_2]