

{kind=link}
[ad_1]
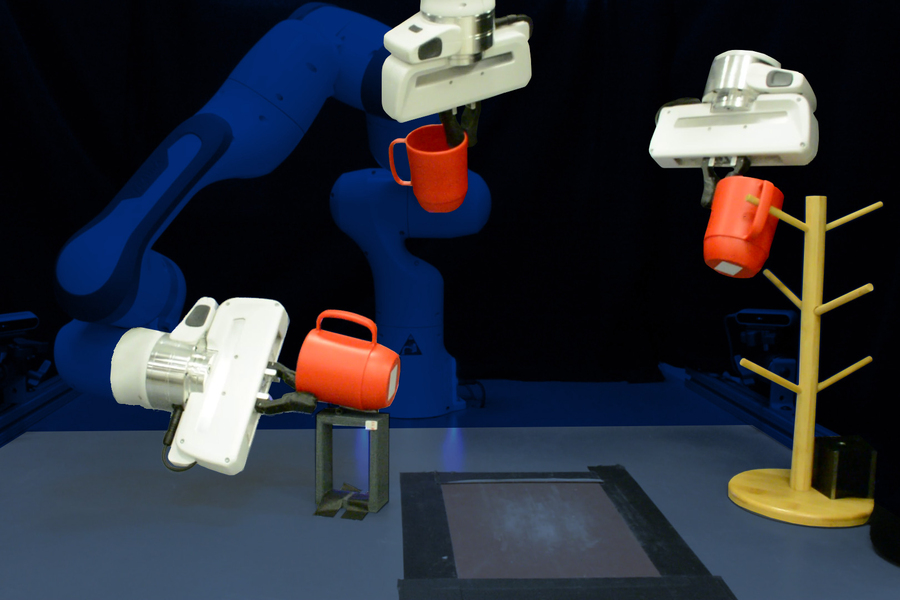
MIT researchers have developed a system that permits a robotic to study a brand new pick-and-place process primarily based on solely a handful of human examples. This might permit a human to reprogram a robotic to understand never-before-seen objects, offered in random poses, in about quarter-hour. Courtesy of the researchers
By Adam Zewe | MIT Information Workplace
With e-commerce orders pouring in, a warehouse robotic picks mugs off a shelf and locations them into bins for delivery. All the pieces is buzzing alongside, till the warehouse processes a change and the robotic should now grasp taller, narrower mugs which might be saved the wrong way up.
Reprogramming that robotic includes hand-labeling 1000’s of photographs that present it easy methods to grasp these new mugs, then coaching the system over again.
However a brand new approach developed by MIT researchers would require solely a handful of human demonstrations to reprogram the robotic. This machine-learning technique allows a robotic to select up and place never-before-seen objects which might be in random poses it has by no means encountered. Inside 10 to fifteen minutes, the robotic could be able to carry out a brand new pick-and-place process.
The approach makes use of a neural community particularly designed to reconstruct the shapes of 3D objects. With just some demonstrations, the system makes use of what the neural community has realized about 3D geometry to understand new objects which might be much like these within the demos.
In simulations and utilizing an actual robotic arm, the researchers present that their system can successfully manipulate never-before-seen mugs, bowls, and bottles, organized in random poses, utilizing solely 10 demonstrations to show the robotic.
“Our main contribution is the final means to far more effectively present new expertise to robots that have to function in additional unstructured environments the place there could possibly be loads of variability. The idea of generalization by development is an enchanting functionality as a result of this downside is often a lot more durable,” says Anthony Simeonov, a graduate pupil in electrical engineering and pc science (EECS) and co-lead creator of the paper.
Simeonov wrote the paper with co-lead creator Yilun Du, an EECS graduate pupil; Andrea Tagliasacchi, a workers analysis scientist at Google Mind; Joshua B. Tenenbaum, the Paul E. Newton Profession Improvement Professor of Cognitive Science and Computation within the Division of Mind and Cognitive Sciences and a member of the Laptop Science and Synthetic Intelligence Laboratory (CSAIL); Alberto Rodriguez, the Class of 1957 Affiliate Professor within the Division of Mechanical Engineering; and senior authors Pulkit Agrawal, a professor in CSAIL, and Vincent Sitzmann, an incoming assistant professor in EECS. The analysis will probably be offered on the Worldwide Convention on Robotics and Automation.
Greedy geometry
A robotic could also be skilled to select up a particular merchandise, but when that object is mendacity on its facet (maybe it fell over), the robotic sees this as a very new state of affairs. That is one purpose it’s so arduous for machine-learning techniques to generalize to new object orientations.
To beat this problem, the researchers created a brand new kind of neural community mannequin, a Neural Descriptor Area (NDF), that learns the 3D geometry of a category of things. The mannequin computes the geometric illustration for a particular merchandise utilizing a 3D level cloud, which is a set of information factors or coordinates in three dimensions. The info factors will be obtained from a depth digicam that gives data on the space between the article and a viewpoint. Whereas the community was skilled in simulation on a big dataset of artificial 3D shapes, it may be immediately utilized to things in the actual world.
The group designed the NDF with a property referred to as equivariance. With this property, if the mannequin is proven a picture of an upright mug, after which proven a picture of the identical mug on its facet, it understands that the second mug is identical object, simply rotated.
“This equivariance is what permits us to far more successfully deal with circumstances the place the article you observe is in some arbitrary orientation,” Simeonov says.
Because the NDF learns to reconstruct shapes of comparable objects, it additionally learns to affiliate associated elements of these objects. For example, it learns that the handles of mugs are comparable, even when some mugs are taller or wider than others, or have smaller or longer handles.
“Should you wished to do that with one other method, you’d need to hand-label all of the elements. As an alternative, our method robotically discovers these elements from the form reconstruction,” Du says.
The researchers use this skilled NDF mannequin to show a robotic a brand new talent with only some bodily examples. They transfer the hand of the robotic onto the a part of an object they need it to grip, just like the rim of a bowl or the deal with of a mug, and file the places of the fingertips.
As a result of the NDF has realized a lot about 3D geometry and easy methods to reconstruct shapes, it might probably infer the construction of a brand new form, which allows the system to switch the demonstrations to new objects in arbitrary poses, Du explains.
Choosing a winner
They examined their mannequin in simulations and on an actual robotic arm utilizing mugs, bowls, and bottles as objects. Their technique had successful price of 85 % on pick-and-place duties with new objects in new orientations, whereas the very best baseline was solely capable of obtain successful price of 45 %. Success means greedy a brand new object and putting it on a goal location, like hanging mugs on a rack.
Many baselines use 2D picture data reasonably than 3D geometry, which makes it tougher for these strategies to combine equivariance. That is one purpose the NDF approach carried out so a lot better.
Whereas the researchers have been proud of its efficiency, their technique solely works for the actual object class on which it’s skilled. A robotic taught to select up mugs received’t have the ability to decide up bins or headphones, since these objects have geometric options which might be too totally different than what the community was skilled on.
“Sooner or later, scaling it as much as many classes or fully letting go of the notion of class altogether could be preferrred,” Simeonov says.
Additionally they plan to adapt the system for nonrigid objects and, in the long run, allow the system to carry out pick-and-place duties when the goal space adjustments.
This work is supported, partially, by the Protection Superior Analysis Initiatives Company, the Singapore Protection Science and Expertise Company, and the Nationwide Science Basis.
tags: c-Industrial-Automation, Manipulation

MIT Information
[ad_2]