

{kind=link}
[ad_1]
|
Hearken to this text  |
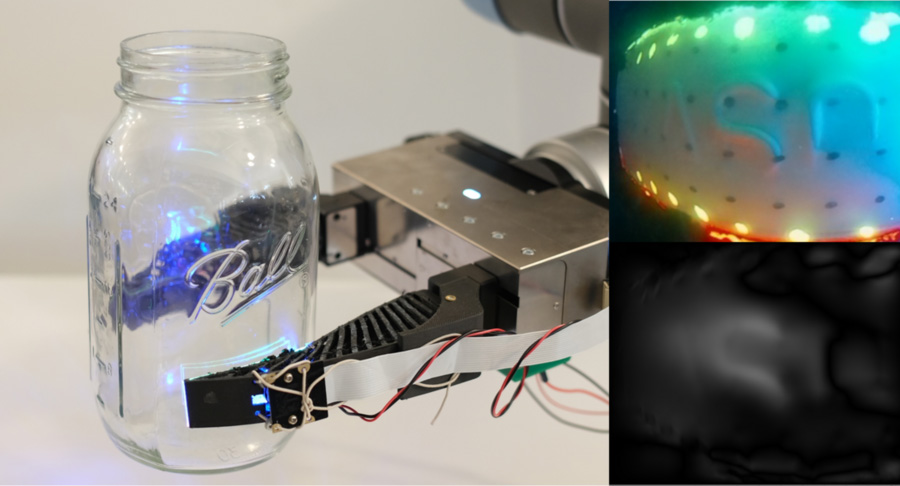
The GelSight fin ray gripper was in a position to really feel the sample on Mason jars. | Supply: CSAIL
A analysis group at MIT’s Pc Science and Synthetic Intelligence Laboratory (CSAIL) has developed a robotic gripper with fin ray fingers which are in a position to really feel the objects it manipulates.
The Perceptual Science Group at CSAIL, led by professor Edward Adelson and Sandra Liu, a mechanical engineering PhD pupil, created contact sensors for his or her gripper, permitting it to really feel with the identical or extra sensitivity as human pores and skin.
The group’s gripper is manufactured from two fin ray fingers. The fingers act just like a fish’s tail, which is able to bend in direction of an utilized pressure slightly than away, and are 3D printed from a versatile plastic materials. Typical fin ray grippers have cross-struts that run via the inside, however the CSAIL group determined to hole out the inside to make room for his or her sensory parts.
The within of the gripper is illuminated by LEDs. On one finish of the hollowed-out gripper sits a digital camera mounted to a semi-rigid backing. The digital camera faces a layer of pads manufactured from a silicone gel referred to as GelSight. The layer of pads is glued to a skinny sheet of acrylic materials, which is hooked up to the other finish of the internal cavity.
The gripper is designed to fold seamlessly across the objects it grips. The digital camera determines how the silicone and acrylic sheets deform because it touches an object. From these observations, the digital camera, with computational algorithms, can work out the final form of the item, how tough its floor is, its orientation in house and the pressure being utilized by, and imparted to, every finger.
Utilizing this technique, the gripper was in a position to deal with a wide range of objects, together with a mini-screwdriving, a plastic strawberry, an acrylic paint tube, a Ball Mason jar and a wine glass.
Whereas holding these objects, the gripper was in a position to detect nice particulars on their surfaces. For instance, on the plastic strawberry, the gripper may establish particular person seeds on its floor. The fingers may additionally really feel the lettering on the Mason jar, one thing that vision-based robotics wrestle with due to the way in which glass objects refract mild.
Moreover, the gripper may squeeze a paint tube with out breaking the container and spilling its contents, and decide up and put down a wine glass. The gripper may sense when the bottom of the glass touched the tabletop, leading to correct placement seven out of 10 occasions.
The group hopes to enhance on the sensor by making the fingers stronger. By eradicating the cross-struts, the group additionally eliminated a lot of the structural integrity, that means the fingers generally tend to twist whereas gripping issues. The CSAIL group additionally need to create a 3 fingered gripper that would decide up vegatables and fruits and consider their ripeness.
The group’s work was introduced on the 2022 IEEE fifth Worldwide Convention on smooth robotics.
[ad_2]