

{kind=link}
[ad_1]
Though I don’t contemplate myself an especially skilled drone pilot, I’ve a good period of time on the management sticks of a number of totally different DJI fashions, particularly from the Mavic line of plane. So, after I determined to construct my first “DIY” drone final summer season so I may higher perceive the subsystems concerned in making quadcopters fly, I believed, how arduous may it’s? I’d quickly study, fairly arduous.
I feel only a few folks, even those that often fly in style industrial manufacturers like DJI, actually recognize the superb stability of those plane. Their unbelievable capacity, even in windy situations, to carry altitude and place can’t be understated. As well as, the way in which these plane flatten the training curve for brand spanking new pilots is each a blessing and a curse; A blessing in that you may rise up within the air rapidly and safely, however a curse in that it offers the misunderstanding that you may fly any quadcopter – a indisputable fact that I’d quickly study was not true in my state of affairs.
First the specifics, I opted for a carbon fiber body (which turned out to be a extremely good choice) however caught to fairly commonplace components in addition to that. I chosen the Pixhawk flight controller as the center of my system, primarily based on opinions and capabilities nicely above its predecessor. This controller and the software program used to program it, Ardupilot’s Mission Planner, turned out to be the silver lining in what was a summer season stuffed with plenty of theoretical rain clouds. Beside the motors and the digital velocity controllers (ESC) a lot of the auxiliary tools got here as a part of a package deal that accompanied the flight controller.
Then started the lengthy however attention-grabbing undertaking of understanding (and wiring) all these parts collectively, with the anticipation of a simple raise off and easy flying when completed; as you’ll be able to in all probability guess primarily based upon my earlier feedback, that assumption was incorrect, and the wiring and understanding of the system grew to become the least of my issues in getting this new plane off the bottom safely. When completed with all of the wiring, I used to be fairly pleased with my creation (see determine 1) and prepared for my first flight, or so I believed. After making the psychological adjustment to the throttle stick not centering, as do most DJI fashions, I tried my first take-off with little understanding of the totally different flight modes and the right way to program my distant management to pick the suitable one for the present state of affairs. This was after (I’m ashamed to confess this) I flipped the props round so they might raise the plane off the bottom and never push it downward.

Determine 1 – My DIY drone previous to its first flight/crash
After liftoff, it grew to become obvious (somewhat rapidly) that this was not a DJI drone, and I nonetheless had loads left to study. That flight, when you may name it that, didn’t final lengthy and led to my first of many crashes. I’d spend the remainder of my summer season trip studying all about PID loops, ESC calibrations, flight modes and every part else that DJI pilots take with no consideration; all of the whereas being grateful for that carbon fiber body I paid further for initially; it took a LOT of abuse and by no means failed, in contrast to different parts which I’ve needed to exchange.
The silver lining I discussed earlier, Ardupilot’s Mission Planner, grew to become my new greatest pal and the main target of my studying. This superb neighborhood supported software program is extraordinarily versatile, and never only for quadcopters. A developer’s dream, the exact management over so many variables, in addition to the power to obtain and monitor numerous flight traits, makes it the “go to” programming software program for DIY plane of all kinds. The guts of this technique is the “Flight Information” display screen (see determine 2) which permits the pilot or floor crew to observe all of the vitals of the plane and reveals an correct, simple to learn plane angle and place/heading on a big map. Previous to preliminary launch, Mission Planner has a number of setup and configuration screens that customers should develop into conversant in, particularly with the “tuning” choices and flight mode configurations.
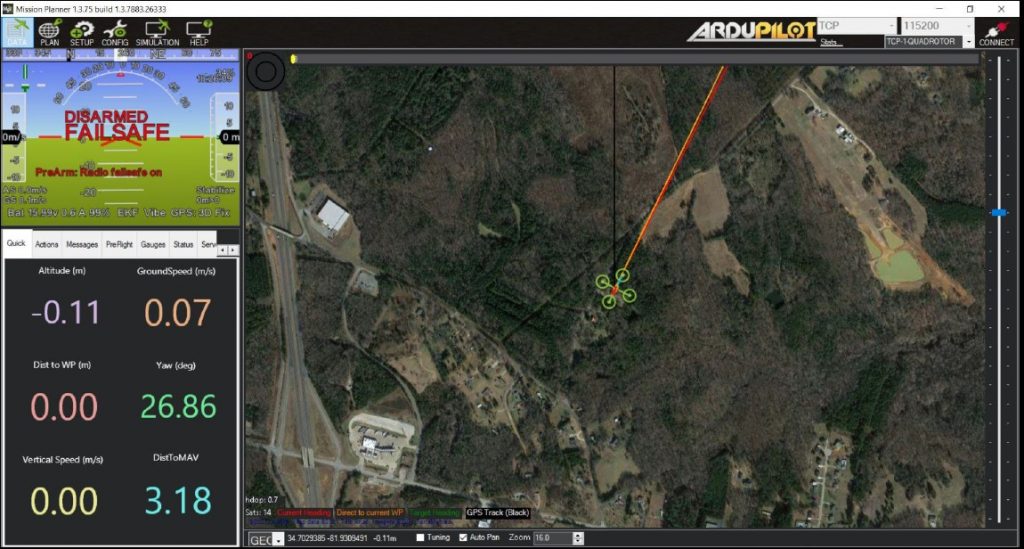
Determine 2 – The Flight Information Display screen of the Ardupilot’s Mission Planner Software program
It was in these setup screens that I started to understand the facility of this software program and likewise actually started to understand the intensive growth work concerned in industrial plane just like the DJI Mavic line. Though the record of attributes that may be adjusted and set is actually pages lengthy, two subsystems actually stand-out; one for it’s complexity, and the opposite for it’s absolute necessity regarding the person having a agency understanding of it. The complicated one is the acquire controls on the most important axis which make up the flight traits of all quadcopters – roll, pitch, yaw and throttle or altitude.
Generally known as the PID loops, referring to the proportional–integral–spinoff mathematical capabilities used to make sure the plane responds appropriately with out over correcting or responding too slowly to inputs on the 4 main planes of motion. Though there are default settings for these, to make sure regular flight, these have to be adjusted for every particular plane. Many traits of the plane can have an effect on these settings together with apparent ones comparable to weight and out there thrust, however even issues extra delicate such because the size of the propellor.
Though the PID loops have to be understood, at the least on a purposeful stage, understanding and setting the flight modes for the distant management is essential. Unknown to most leisure drone pilots, particularly those that use DJI merchandise, is that the power to launch the controls and have the plane maintain its present place is a particular flight mode known as “loiter” and never inherent to all drones. Inside Mission Planner, there are 24 attainable modes, with solely about half of these of curiosity to most pilots. In addition to the loiter mode talked about earlier, there are some that make excellent sense to anybody who has spent any time flying drones – Return to Land (house) and land. The default flight mode for many controllers, which induced most of my early crashes, is the stabilize mode. On this mode, solely the roll and pitch are “stabilized” and the pilot should actively fly the plane always. This was fairly a change coming from flying DJI plane; understanding it, and studying the right way to program my distant to pick the totally different modes, was a vital first step in achieving secure and managed flight.
One fascinating mode which mixes collectively the 2 essential subsystems described above is the “autotune” mode. On this mode, the plane will carry out a sequence of actions on it’s personal and modify the PID loops primarily based upon suggestions from the onboard Inertial Measurement Items (IMU) which primarily homes an accelerometer and gyroscope. Though not an absolute necessity, this further step will certainly enhance the soundness of flight and help particularly new DIY pilots as they transition from industrial plane. In order you may in all probability think about, after I lastly achieved steady flight (see determine 3) it was a satisfying second. Nevertheless, in contrast to the moment gratification that comes with flying industrial fashions just like the DJI merchandise, this one was a very long time coming. I can not overstate how a lot I realized throughout this course of which has helped me not solely as a pilot, but additionally when it comes to my technical information of every part that makes drones so steady and versatile. This expertise has additionally opened up an unlimited variety of new choices for me when it comes to growth and enterprise alternatives. It’s arduous to think about that there’s not a distinct segment marketplace for totally custom-made, specialty-built programs that rival the high-end Matrice fashion programs at a a lot decrease value.

Determine 3 – Lastly! Steady flight with my DIY drone.
The following step is to put in and program two main options that when once more, DJI homeowners take with no consideration – collision avoidance and gimbal/sensor management. These two subsystems, which at present don’t exist on my DIY construct, will current extra “alternatives” to develop my information of this fascinating wing (pun meant) of small unmanned aerial programs. However I feel it’s inside this space that DIY quadcopters actually start to shine. Now, you aren’t relegated to the onboard programs as they’re shipped from the manufacturing facility; now you’ll be able to totally customise your plane to satisfy your particular wants or that of your clients, and the way cool would that be! TEXT & PHOTOS BY CHRIS LIPP
ABOUT THE AUTHOR: Chris Lipp is a Pc Science and Robotics Teacher at Christ Church Episcopal College in Greenville, SC. Chris is Half 107 certificated distant pilot and holds a TOP Stage 2 certification from AUVSI. As well as, he’s at present pursuing his Grasp Diploma in Unmanned Methods at his alma mater, Embry-Riddle Aeronautical College.
[ad_2]