

{kind=link}
[ad_1]
At only one 12 months previous, a child is extra dexterous than a robotic. Certain, machines can do extra than simply decide up and put down objects, however we’re not fairly there so far as replicating a pure pull towards exploratory or subtle dexterous manipulation goes.
Synthetic intelligence agency OpenAI gave it a attempt with Dactyl (which means “finger,” from the Greek phrase “daktylos”), utilizing their humanoid robotic hand to resolve a Rubik’s dice with software program that’s a step towards extra common AI, and a step away from the frequent single-task mentality. DeepMind created “RGB-Stacking,” a vision-based system that challenges a robotic to discover ways to seize objects and stack them.
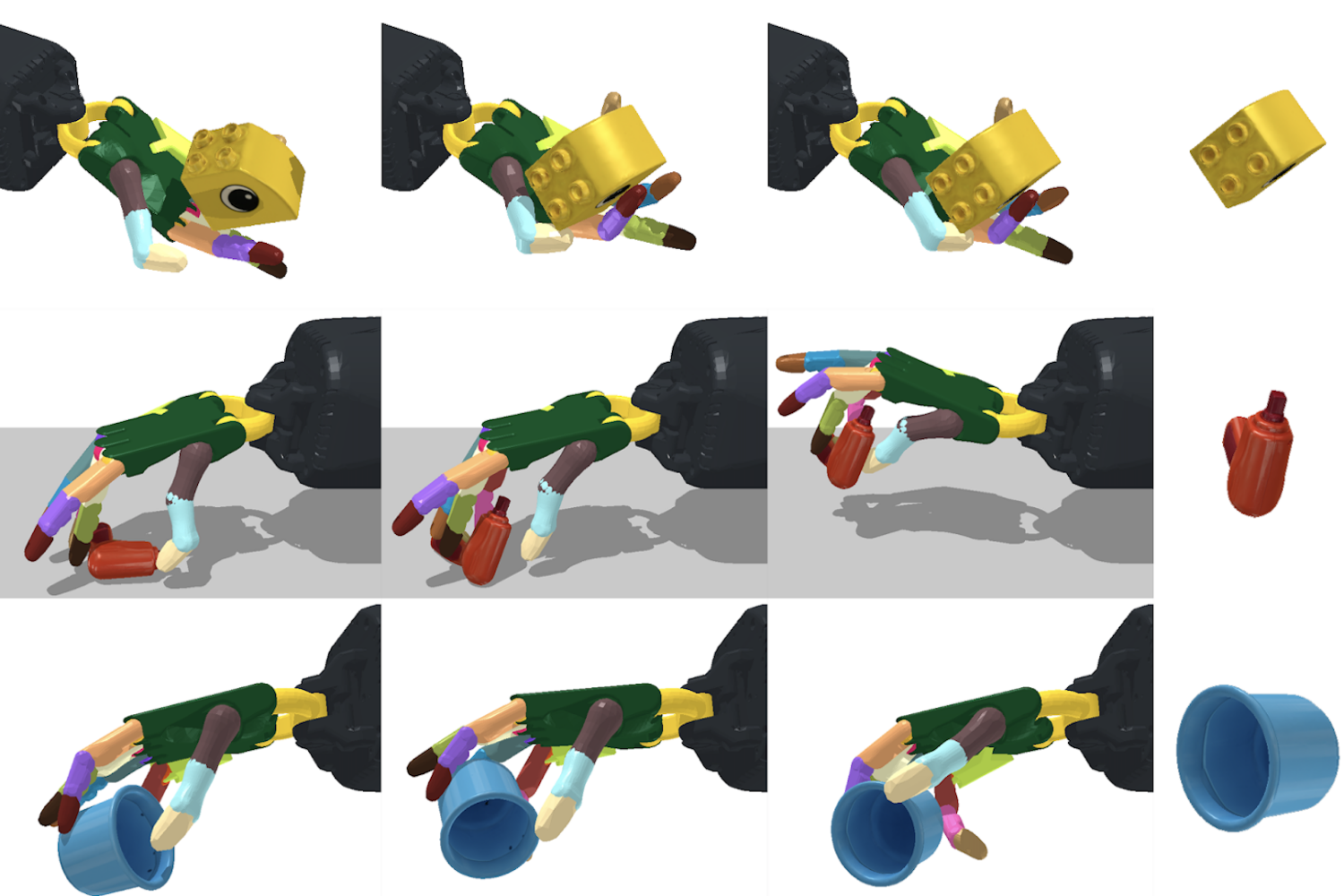
Scientists from MIT’s Pc Science and Synthetic Intelligence Laboratory (CSAIL), within the ever-present quest to get machines to copy human skills, created a framework that’s extra scaled up: a system that may reorient over 2,000 totally different objects, with the robotic hand dealing with each upwards and downwards. This means to control something from a cup to a tuna can to a Cheez-It field may assist the hand rapidly pick-and-place objects in particular methods and areas — and even generalize to unseen objects.
This deft “handiwork” — which is often restricted to single duties and upright positions — might be an asset in dashing up logistics and manufacturing, serving to with frequent calls for reminiscent of packing objects into slots for kitting, or dexterously manipulating a wider vary of instruments. The staff used a simulated, anthropomorphic hand with 24 levels of freedom, and confirmed proof that the system might be transferred to an actual robotic system sooner or later.
“In business, a parallel-jaw gripper is mostly used, partially resulting from its simplicity in management, nevertheless it’s bodily unable to deal with many instruments we see in day by day life,” says MIT CSAIL PhD scholar Tao Chen, member of the MIT Inconceivable AI Lab and the lead researcher on the undertaking. “Even utilizing a plier is tough as a result of it may’t dexterously transfer one deal with forwards and backwards. Our system will permit a multi-fingered hand to dexterously manipulate such instruments, which opens up a brand new space for robotics purposes.”
This kind of “in-hand” object reorientation has been a difficult drawback in robotics, because of the giant variety of motors to be managed and the frequent change involved state between the fingers and the objects. And with over 2,000 objects, the mannequin had quite a bit to study.
The issue turns into much more tough when the hand is dealing with downwards. Not solely does the robotic want to control the thing, but in addition circumvent gravity so it doesn’t fall down.
The staff discovered {that a} easy method may clear up complicated issues. They used a model-free reinforcement studying algorithm (which means the system has to determine worth features from interactions with the surroundings) with deep studying, and one thing referred to as a “teacher-student” coaching methodology.
For this to work, the “instructor” community is skilled on details about the thing and robotic that’s simply obtainable in simulation, however not in the true world, reminiscent of the placement of fingertips or object velocity. To make sure that the robots can work exterior of the simulation, the information of the “instructor” is distilled into observations that may be acquired in the true world, reminiscent of depth photos captured by cameras, object pose, and the robotic’s joint positions. Additionally they used a “gravity curriculum,” the place the robotic first learns the talent in a zero-gravity surroundings, after which slowly adapts the controller to the conventional gravity situation, which, when taking issues at this tempo, actually improved the general efficiency.
Whereas seemingly counterintuitive, a single controller (referred to as mind of the robotic) may reorient numerous objects it had by no means seen earlier than, and with no information of form.
“We initially thought that visible notion algorithms for inferring form whereas the robotic manipulates the thing was going to be the first problem,” says MIT Professor Pulkit Agrawal, an writer on the paper concerning the analysis. “On the contrary, our outcomes present that one can study sturdy management methods which might be shape-agnostic. This means that visible notion could also be far much less essential for manipulation than what we’re used to considering, and less complicated perceptual processing methods would possibly suffice.”
Many small, round formed objects (apples, tennis balls, marbles), had near 100% success charges when reoriented with the hand dealing with up and down, with the bottom success charges, unsurprisingly, for extra complicated objects, like a spoon, a screwdriver, or scissors, being nearer to 30 %.
Past bringing the system out into the wild, since success charges diverse with object form, sooner or later, the staff notes that coaching the mannequin primarily based on object shapes may enhance efficiency.
Chen wrote a paper concerning the analysis alongside MIT CSAIL PhD scholar Jie Xu and MIT Professor Pulkit Agrawal. The analysis is funded by Toyota Analysis Institute, Amazon Analysis Award, and DARPA Machine Widespread Sense Program. Will probably be offered on the 2021 The Convention on Robotic Studying (CoRL).
[ad_2]