

{kind=link}
[ad_1]
Congratulations to Huy Ha and Shuran Tune who’ve gained the CoRL 2021 greatest system paper award!
Their work, FlingBot: the unreasonable effectiveness of dynamic manipulations for fabric unfolding, was extremely praised by the judging committee. “To me, this paper constitutes probably the most spectacular account of each simulated and real-world fabric manipulation so far.”, commented one of many reviewers.
Under, the authors inform us extra about their work, the methodology, and what they’re planning subsequent.
What’s the matter of the analysis in your paper?
In my most up-to-date publication with my advisor, Professor Shuran Tune, we studied the duty of material unfolding. The purpose of the duty is to govern a fabric from a crumpled preliminary state to an unfolded state, which is equal to maximizing the protection of the fabric on the workspace.
Might you inform us concerning the implications of your analysis and why it’s an attention-grabbing space for research?
Traditionally, most robotic manipulation analysis subjects, similar to grasp planning, are involved with inflexible objects, which have solely 6 levels of freedom since their geometry doesn’t change. This enables one to use the everyday state estimation – process & movement planning pipeline in robotics. In distinction, deformable objects might bend and stretch in arbitrary instructions, resulting in infinite levels of freedom. It’s unclear what the state of the fabric ought to even be. As well as, deformable objects similar to garments might expertise extreme self occlusion – given a crumpled piece of material, it’s tough to establish whether or not it’s a shirt, jacket, or pair of pants. Subsequently, fabric unfolding is a typical first step of material manipulation pipelines, because it reveals key options of the fabric for downstream notion and manipulation.
Regardless of the abundance of subtle strategies for fabric unfolding over time, they usually solely deal with the simple case (the place the fabric already begins off principally unfolded) or take upwards of 100 steps for difficult circumstances. These prior works all use single arm quasi-static actions, similar to choose and place, which is sluggish and restricted by the bodily attain vary of the system.
Might you clarify your methodology?
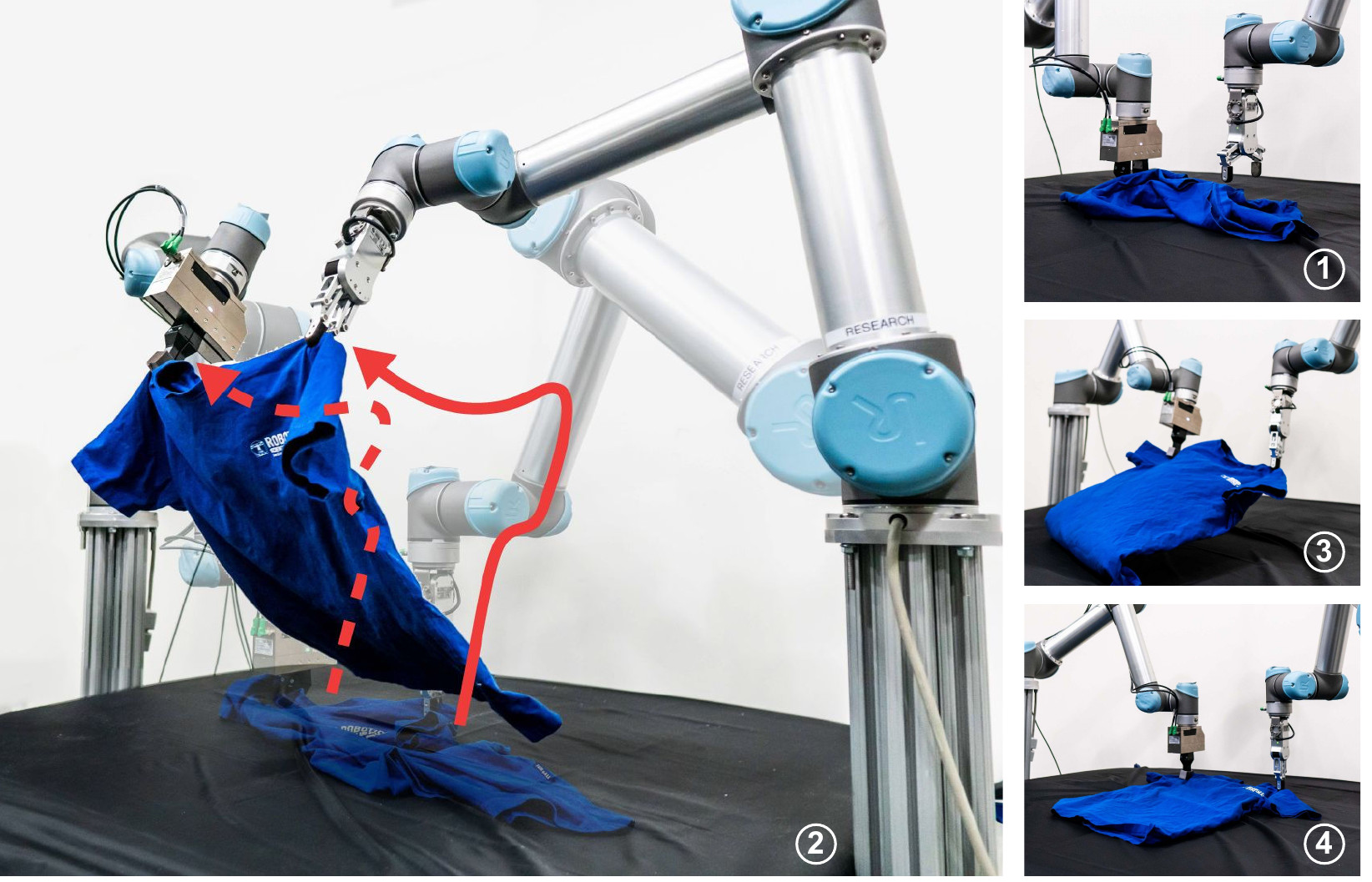
In our day by day lives, people usually use each arms to govern cloths, and with as little as a single excessive velocity fling or two, we are able to unfold an initially crumpled fabric. Primarily based on this statement, our key concept is straightforward: Use twin arm dynamic actions for fabric unfolding.
FlingBot is a self-supervised framework for fabric unfolding which makes use of a choose, stretch, and fling primitive for a dual-arm setup from visible observations. There are three key elements to our method. First is the choice to make use of a excessive velocity dynamic motion. By counting on cloths’ mass mixed with a high-velocity throw to do most of its work, a dynamic flinging coverage can unfold cloths rather more effectively than a quasi-static coverage. Second is a dual-arm grasp parameterization which makes satisfying collision security constraints simple. By treating a dual-arm grasp not as two factors however as a line with a rotation and size, we are able to instantly constrain the rotation and size of the road to make sure arms don’t cross over one another and don’t attempt to grasp too shut to one another. Third is our selection of utilizing Spatial Motion Maps, which learns translational, rotational, and scale equivariant worth maps, and permits for pattern environment friendly studying.
What have been your primary findings?
We discovered that dynamic actions have three fascinating properties over quasi-static actions for the duty of material unfolding. First, they’re environment friendly – FlingBot achieves over 80% protection inside 3 actions on novel cloths. Second, they’re generalizable – educated on solely sq. cloths, FlingBot additionally generalizes to T-shirts. Third, they develop the system’s efficient attain vary – even when FlingBot can’t totally carry or stretch a fabric bigger than the system’s bodily attain vary, it’s in a position to make use of excessive velocity flings to unfold the fabric.
After coaching and evaluating our mannequin in simulation, we deployed and finetuned our mannequin on an actual world dual-arm system, which achieves above 80% protection for all fabric classes. In the meantime, the quasi-static choose & place baseline was solely capable of obtain round 40% protection.
What additional work are you planning on this space?
Though we motivated fabric unfolding as a precursor for downstream modules similar to fabric state estimation, unfolding might additionally profit from state estimation. For example, if the system is assured it has recognized the shoulders of the shirt in its state estimation, the unfolding coverage might instantly grasp the shoulders and unfold the shirt in a single step. Primarily based on this statement, we’re at present engaged on a fabric unfolding and state estimation method which may study in a self-supervised method in the actual world.
In regards to the authors
|
Huy Ha is a Ph.D. pupil in Laptop Science at Columbia College. He’s suggested by Professor Shuran Tune and is a member of the Columbia Synthetic Intelligence and Robotics (CAIR) lab. |
|
Shuran Tune is an assistant professor in laptop science division at Columbia College, the place she directs the Columbia Synthetic Intelligence and Robotics (CAIR) Lab. Her analysis focuses on laptop imaginative and prescient and robotics. She’s all in favour of growing algorithms that allow clever programs to study from their interactions with the bodily world, and autonomously purchase the notion and manipulation abilities essential to execute advanced duties and help individuals. |
Discover out extra
- Learn the paper on arXiv.
- The movies of the real-world experiments and code can be found right here, as is a video of the authors’ presentation at CoRL.
- Learn extra concerning the profitable and shortlisted papers for the CoRL awards right here.
tags: c-Analysis-Innovation, Manipulation

Daniel Carrillo-Zapata
was awared his PhD in swarm robotics on the Bristol Robotics Lab in 2020. He now fosters the tradition of “scientific agitation” to have interaction in two-way conversations between researchers and society.
Daniel Carrillo-Zapata
was awared his PhD in swarm robotics on the Bristol Robotics Lab in 2020. He now fosters the tradition of “scientific agitation” to have interaction in two-way conversations between researchers and society.
[ad_2]